





なぜ枯渇モードなのかというと、MOSFETは使用されていないため、最後まで理解することはお勧めしません。
これら 2 つのエンハンスメント モード MOSFET では、NMOS がより一般的に使用されます。その理由は、オン抵抗が小さく、製造が容易であるためである。したがって、NMOS は一般にスイッチング電源やモーター駆動アプリケーションに使用されます。以下の紹介では、主に NMOS が使用されます。
MOSFET の 3 つのピンの間には寄生容量があります。これは私たちが必要とするものではなく、製造プロセスの制限によって引き起こされます。寄生容量の存在は駆動回路の設計や選択の際に厄介な要素となりますが、これを避ける方法はありません。後ほど詳しくご紹介させていただきます。
ドレインとソースの間には寄生ダイオードが存在します。これをボディダイオードと呼びます。このダイオードは、誘導性負荷 (モーターなど) を駆動する場合に非常に重要です。ちなみに、ボディ ダイオードは単一の MOSFET 内にのみ存在し、通常は集積回路チップ内には存在しません。
2. MOSFETの導通特性
導通とはスイッチとして機能することを意味し、スイッチが閉じていることと同じです。
NMOSはVgsが一定値以上になるとオンする特性があります。ゲート電圧が4Vまたは10Vに達する限り、ソースが接地されている場合(ローエンド駆動)の使用に適しています。
PMOS の特性は、Vgs が特定の値よりも低いときにオンになることです。これは、ソースが VCC に接続されている状況 (ハイエンド駆動) に適しています。ただし、PMOSNMOSはハイエンドドライバーとして容易に使用できますが、NMOSはオン抵抗が大きく、価格が高く、置換種類が少ないため、通常ハイエンドドライバーで使用されます。
3. MOSスイッチ管損失
NMOSでもPMOSでも、オンした後はオン抵抗が存在するため、電流はこの抵抗でエネルギーを消費します。消費されるエネルギーのこの部分は、伝導損失と呼ばれます。オン抵抗が小さい MOSFET を選択すると、伝導損失が減少します。現在の低電力 MOSFET のオン抵抗は一般的に数十ミリオーム程度ですが、数ミリオームのものも存在します。
MOSFET のオンとオフは瞬時に完了してはなりません。 MOS にかかる電圧は減少する過程を持ち、流れる電流は増加する過程を持ちます。この期間中、MOSFET損失は電圧と電流の積であり、スイッチング損失と呼ばれます。通常、スイッチング損失は導通損失よりもはるかに大きく、スイッチング周波数が速いほど損失も大きくなります。
通電時の電圧と電流の積は非常に大きく、大きな損失が発生します。スイッチング時間を短縮すると、各導通時の損失を減らすことができます。スイッチング周波数を下げると、単位時間あたりのスイッチ数を減らすことができます。どちらの方法でもスイッチング損失を低減できます。
MOSFETがオンしたときの波形です。通電時の電圧と電流の積が非常に大きく、発生する損失も非常に大きいことがわかります。スイッチング時間を短縮すると、各導通時の損失を減らすことができます。スイッチング周波数を下げると、単位時間あたりのスイッチ数を減らすことができます。どちらの方法でもスイッチング損失を低減できます。
4.MOSFETドライバー
バイポーラ トランジスタと比較して、GS 電圧が特定の値より高い限り、MOSFET をオンにするのに電流は必要ないと一般に考えられています。これは簡単ですが、スピードも必要です。
MOSFET の構造から、GS と GD の間に寄生容量が存在することがわかり、MOSFET の駆動は実際にはコンデンサの充放電によって行われます。コンデンサの充電には電流が必要ですが、充電の瞬間はコンデンサがショートしているとみなせるため、瞬間的な電流は比較的大きくなります。 MOSFET ドライバーを選択/設計する際に最初に注意すべきことは、それが提供できる瞬間的な短絡電流の量です。
2 番目に注意すべきことは、ハイエンドの駆動に一般的に使用される NMOS は、オン時にゲート電圧がソース電圧よりも大きい必要があるということです。ハイサイド駆動 MOSFET がオンになると、ソース電圧はドレイン電圧 (VCC) と同じになるため、このときのゲート電圧は VCC より 4V または 10V 高くなります。同じシステム内で VCC より大きな電圧を得たい場合は、特別な昇圧回路が必要です。多くのモーター ドライバーにはチャージ ポンプが統合されています。 MOSFETを駆動するのに十分な短絡電流を得るには、適切な外付けコンデンサを選択する必要があることに注意してください。
上記の 4V または 10V は一般的に使用される MOSFET のターンオン電圧であり、当然のことながらある程度のマージンを考慮して設計する必要があります。また、電圧が高いほど導通速度は速くなり、導通抵抗は小さくなります。現在、さまざまな分野でより小さな導通電圧を備えた MOSFET が使用されていますが、12V の車載電子システムでは、一般に 4V の導通電圧で十分です。
MOSFET ドライバ回路とその損失については、Microchip 社の「AN799 Matching MOSFET Drivers to MOSFET」を参照してください。非常に詳しいのでこれ以上は書きません。
通電時の電圧と電流の積は非常に大きく、大きな損失が発生します。スイッチング時間を短縮すると、各導通時の損失を減らすことができます。スイッチング周波数を下げると、単位時間あたりのスイッチ数を減らすことができます。どちらの方法でもスイッチング損失を低減できます。
MOSFET は FET の一種です (もう 1 つは JFET)。エンハンスメントモードまたはデプレッションモード、PチャネルまたはNチャネルの合計4種類にすることができます。ただし、実際にはエンハンスメント モードの N チャネル MOSFET のみが使用されます。エンハンスメント型 P チャネル MOSFET があるため、NMOS または PMOS は通常この 2 つのタイプを指します。
5.MOSFET応用回路?
MOSFETはスイッチング特性が良いことが最大の特徴で、照明の調光だけでなく、スイッチング電源やモーター駆動など電子スイッチが必要な回路に広く使用されています。
今日の MOSFET ドライバーには、いくつかの特別な要件があります。
1. 低電圧アプリケーション
5V電源を使用する場合、この時点で従来のトーテムポール構造を使用すると、トランジスタの電圧降下は約0.7Vとなるため、実際の最終ゲート電圧は4.3Vしかかかりません。この時点では、公称ゲート電力を選択します
4.5V MOSFET の使用には一定のリスクがあります。 3V などの低電圧電源を使用する場合にも同じ問題が発生します。
2. 幅広い電圧対応
入力電圧は固定値ではなく、時間やその他の要因によって変化します。この変化により、PWM 回路によって MOSFET に提供される駆動電圧が不安定になります。
高いゲート電圧下でも MOSFET を安全にするために、多くの MOSFET にはゲート電圧の振幅を強制的に制限する電圧レギュレータが組み込まれています。この場合、供給される駆動電圧が電圧調整管の電圧を超えると、大きな静的電力消費が発生します。
同時に、単純に抵抗分圧の原理を利用してゲート電圧を下げると、入力電圧が比較的高い場合にはMOSFETはうまく動作しますが、入力電圧が低下するとゲート電圧が不足し、導通が不完全になり、消費電力が増加します。
3. デュアル電圧印加
一部の制御回路では、ロジック部では一般的な 5V または 3.3V のデジタル電圧が使用され、パワー部では 12V 以上の電圧が使用されます。 2 つの電圧は共通のグランドに接続されます。
このため、低電圧側が高電圧側の MOSFET を効果的に制御できるような回路を使用する必要があります。同時に、高電圧側の MOSFET も 1 と 2 で述べた問題に直面します。
これら 3 つのケースでは、トーテム ポール構造は出力要件を満たすことができず、多くの既製 MOSFET ドライバー IC にはゲート電圧制限構造が含まれていないようです。
そこで、これら 3 つのニーズを満たす比較的一般的な回路を設計しました。
NMOS用ドライバ回路
ここでは、NMOS ドライバー回路の簡単な分析のみを行います。
Vl と Vh はそれぞれローエンドとハイエンドの電源です。 2 つの電圧は同じであってもかまいませんが、Vl が Vh を超えてはなりません。
Q1 と Q2 は逆トーテム ポールを形成し、2 つのドライバー チューブ Q3 と Q4 が同時にオンにならないようにしながら絶縁を実現します。
R2 と R3 は PWM 電圧リファレンスを提供します。この基準を変更することで、PWM 信号波形が比較的急峻な位置で回路を動作させることができます。
Q3 と Q4 は駆動電流を供給するために使用されます。オンになったとき、Q3 と Q4 は、Vh と GND に対して Vce の最小電圧降下のみを持ちます。この電圧降下は通常、わずか約 0.3V であり、Vce の 0.7V よりもはるかに低くなります。
R5 と R6 はフィードバック抵抗で、ゲート電圧をサンプリングするために使用されます。サンプリングされた電圧は、Q1 および Q2 ~ Q5 のベースに強力な負のフィードバックを生成し、ゲート電圧を制限された値に制限します。この値は R5 と R6 を通じて調整できます。
最後に、R1 は Q3 と Q4 のベース電流制限を提供し、R4 は MOSFET のゲート電流制限を提供します。これは Q3 と Q4 の Ice の制限です。必要に応じて、加速コンデンサを R4 に並列に接続できます。
この回路は次の機能を提供します。
1. ローサイド電圧と PWM を使用してハイサイド MOSFET を駆動します。
2. 小さな振幅の PWM 信号を使用して、高いゲート電圧要件を持つ MOSFET を駆動します。
3. ゲート電圧のピークリミット
4. 入力および出力電流制限
5. 適切な抵抗を使用することにより、非常に低い消費電力を実現できます。
6. PWM信号が反転します。 NMOS ではこの機能は必要ないため、インバータを前面に配置することで解決できます。
ポータブル デバイスやワイヤレス製品を設計する場合、製品のパフォーマンスの向上とバッテリー寿命の延長は、設計者が直面する必要がある 2 つの課題です。 DC-DC コンバータには、高効率、大出力電流、低自己消費電流という利点があり、ポータブル デバイスへの電力供給に非常に適しています。現在、DC-DC コンバータ設計技術開発の主な傾向は次のとおりです。 (1) 高周波技術: スイッチング周波数が増加するにつれて、スイッチング コンバータのサイズも縮小され、電力密度も大幅に増加します。ダイナミックレスポンスが向上します。 。低電力 DC-DC コンバータのスイッチング周波数はメガヘルツ レベルまで上昇します。 (2) 低出力電圧技術: 半導体製造技術の継続的な発展に伴い、マイクロプロセッサや携帯型電子機器の動作電圧はますます低くなり、将来の DC-DC コンバータにはマイクロプロセッサに適応する低出力電圧を提供する必要があります。プロセッサーとポータブル電子機器の要件。
これらの技術の発展により、パワーチップ回路の設計に対する要求がさらに高まっています。まず第一に、スイッチング周波数が増加し続けるにつれて、スイッチング素子の性能に対して高い要求が課せられます。同時に、スイッチング素子が MHz までのスイッチング周波数で正常に動作することを保証するために、対応するスイッチング素子駆動回路を設ける必要があります。第二に、バッテリ駆動の携帯用電子機器の場合、回路の動作電圧が低いため(リチウム電池の場合、動作電圧は 2.5 ~ 3.6 V です)、したがって、電源チップの動作電圧も低くなります。
MOSFET はオン抵抗が非常に低く、エネルギー消費が低くなります。 MOSFET は、現在普及している高効率 DC-DC チップの電源スイッチとしてよく使用されます。ただし、MOSFET の寄生容量が大きいため、NMOS スイッチング管のゲート容量は一般に数十ピコファラッドにも達します。これにより、高動作周波数の DC-DC コンバータのスイッチング管駆動回路の設計に対する要求がさらに高まります。
低電圧 ULSI 設計では、ブートストラップ ブースト構造と駆動回路を大きな容量性負荷として使用する、さまざまな CMOS および BiCMOS 論理回路があります。これらの回路は、1V 未満の電源電圧で正常に動作し、1 ~ 2pF の負荷容量で数十 MHz、さらには数百 MHz の周波数で動作できます。この記事では、ブートストラップ昇圧回路を使用して、低電圧、高スイッチング周波数の昇圧 DC-DC コンバータに適した大きな負荷容量の駆動能力を備えた駆動回路を設計します。この回路は Samsung AHP615 BiCMOS プロセスに基づいて設計されており、Hspice シミュレーションによって検証されています。電源電圧が 1.5V、負荷容量が 60pF の場合、動作周波数は 5MHz 以上に達します。
MOSFETスイッチング特性
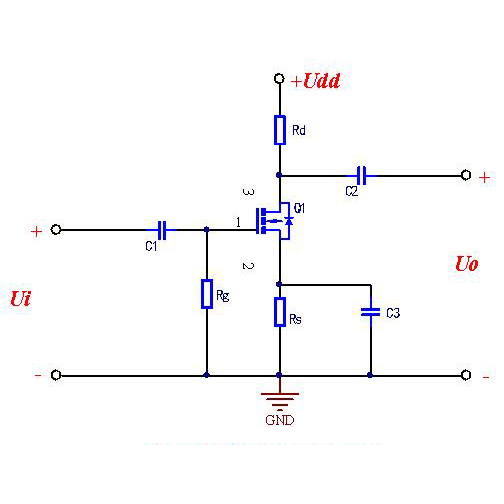
1. 静特性
MOSFET もスイッチング素子として、オフまたはオンの 2 つの状態で動作します。 MOSFET は電圧制御されるコンポーネントであるため、その動作状態は主にゲート ソース間電圧 uGS によって決まります。
動作特性は次のとおりです。
※ uGS<ターンオン電圧 UT: MOSFET はカットオフ領域で動作し、ドレイン・ソース間電流 iDS は基本的に 0、出力電圧 uDS ≒ UDD となり、MOSFET はオフ状態になります。
※ uGS>ターンオン電圧 UT: MOSFET は導通領域で動作し、ドレイン・ソース間電流 iDS=UDD/(RD+rDS)。このうち、rDS は MOSFET がオンしたときのドレイン・ソース間抵抗です。出力電圧 UDS=UDD?rDS/(RD+rDS)、rDS<<RD、uDS≈0Vの場合、MOSFETはオン状態になります。
2. 動特性
MOSFETにもオン/オフ状態を切り替える際の遷移過程がありますが、その動特性は主に回路に関係する浮遊容量の充放電に要する時間と、真空管自体のオン/オフ時の電荷の蓄積と放電に依存します。消散時間は非常に短いです。
入力電圧 ui がハイからローに変化し、MOSFET がオン状態からオフ状態に変化すると、電源 UDD は RD を介して浮遊容量 CL を充電し、充電時定数 τ1=RDCL が充電されます。したがって、出力電圧uoはローレベルからハイレベルに変化する前に一定の遅延を経る必要があります。入力電圧 ui が Low から High に変化し、MOSFET がオフ状態からオン状態に変化すると、浮遊容量 CL の電荷が rDS を通過し、放電時定数 τ2 ≈ rDSCL で放電が発生します。出力電圧 Uo も、ロー レベルに遷移する前に一定の遅延が必要であることがわかります。ただし、rDS は RD よりもはるかに小さいため、カットオフから導通への変換時間は、導通からカットオフへの変換時間よりも短くなります。
MOSFET のオン時のドレイン・ソース間抵抗 rDS はトランジスタの飽和抵抗 rCES よりもはるかに大きく、外部ドレイン抵抗 RD もトランジスタのコレクタ抵抗 RC よりも大きいため、充放電時間は長くなります。 MOSFET の長さが長いため、MOSFET のスイッチング速度はトランジスタに比べて遅くなります。しかし、CMOS回路では、充電回路と放電回路がいずれも低抵抗回路であるため、充電および放電のプロセスが比較的速く、結果としてCMOS回路のスイッチング速度が速くなります。
-
ラージパッケージMOSFETドライバ回路
-
低電圧 MOSFET の役割は何ですか?
-

どのメーカーのMOSFETが良いですか
-

nMOSFET と pMOSFET を決定する方法
-
MOSFETの正しい選択方法
-

MOSFET アンプの完全ガイド: B から
-

最適な駆動回路の選び方・・・
-

MOSFETの駆動回路をご存知ですか?
-

基本的な MOSFET の識別とテスト
-

金属の製造方法について簡単に説明します。
-

MOSFETのゲート・ソース保護
-

高出力 MOSFET が焼損していることを判断する方法
-

MOSFETの基本的な理解
-
MOSFETの3つの主要な役割
-

MOSFETの故障を防ぐには
-

MOSFETの進化についてご存知ですか?



